「世界一ひとにやさしい現場を創る」をミッションに、建設現場の省力化・省人化を実現するロボットソリューションを提供する建ロボテック株式会社(本社:香川県三木町 代表取締役社長兼CEO眞部達也、以下、建ロボテック)は、鉄筋結束トモロボの利用時に人が関わっていたレーンチェンジなどを自動で行う無人結束システムとなる全自動鉄筋結束システム「DUO」を開発しました。また、主力商品である鉄筋結束トモロボが「かぶり30㎜以上」に対応可能となり、これまで対応できなかった現場でトモロボを利用することができます。
■全自動結束システムとは?
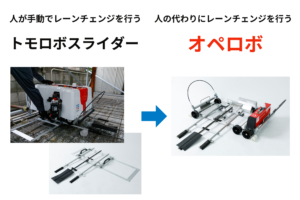
全自動結束システムは、鉄筋結束トモロボが鉄筋端部に達した時に人が行っていたレーンチェンジを代わりに行う「オペロボ」と、人の代わりに結束作業を行う「鉄筋結束トモロボ」を通信連携によって自動作業を行う専用の無人結束システムになります。
これまで、鉄筋結束トモロボが結束しながら進む際に鉄筋両端の折り返し地点では、レーンチェンジのためオプション商品の「トモロボスライダー」を使用し人が手動で行う必要がありました。一方、昨年完成した「オペロボ」によって手動で行っていたレーンチェンジを自動で行うことが可能となりました。
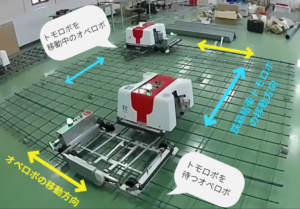
鉄筋結束トモロボとオペロボを通信連携することで、2つのロボットが自動で連携しオペロボはトモロボが来るレーンの列に移動してトモロボが来るまで待機し、トモロボが到着すると次のレーンチェンジをするというこの繰り返しの作業を自動で行います。
全自動結束システムの操作はスマートフォンを使用した専用アプリで行うため、難しい設定等は必要ありません。また、全自動結束システムを稼働している間は人がレーンチェンジを行う必要がないため、人は他の作業に集中したり休憩中も結束作業を進めたりすることができます。
■人の介在が少なくなる全自動結束システム「DUO」
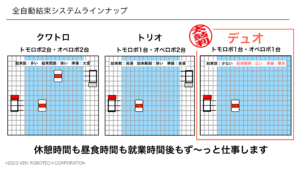
全自動結束システム「DUO」は、従来ラインナップよりも手軽さと結束範囲を広くした、オペロボ・トモロボ各1台ずつで行う方法になります。結束数は従来ラインナップよりも少なくなってしまいますが、トモロボの結束範囲が広くなることで、後にオペロボが移動している箇所を人が結束する際に作業範囲を減らすことができます。また、ロボットの準備は2台だけなので単純に設置等が容易になります。
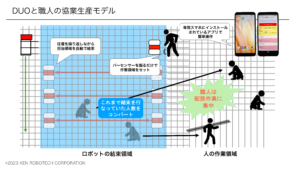
DUOはオペロボ1台の片側のみでレーンチェンジを行います。そのため、オペロボがいない反対側はトモロボが結束してほしい作業領域を人が設定できる仕組みになっています。ここまで結束してほしいという箇所で、ブロック置く or バンパーセンサ―を蹴るだけで作業領域がセットされ、2列目以降トモロボはセットされた箇所まで結束して同列を引き返す往復移動を繰り返しながら、片側のオペロボでレーンチェンジをして自動で設定された作業領域の結束を行います。
人がレーンチェンジに介在することがないので、ロボットから目を離して他の作業を行うことが可能です。例えば、広い現場であれば配筋ができている箇所から結束作業をDUOで行い、職人は残りの配筋作業に注力することができます。
DUOご紹介動画:https://youtu.be/Gf0NQmPwZEk?t=44
■鉄筋結束トモロボ、「かぶり30㎜以上」を対応可能に
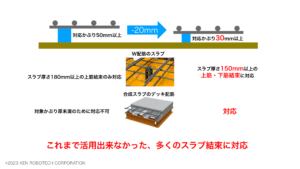
このたび市販の手持ち電動工具をセットするだけで結束作業を自動化できる鉄筋結束トモロボは、鉄筋のかぶり※30㎜以上が対応可能となりました。これまでは、対応かぶりは50㎜以上だったため、W配筋のスラブでは厚さ180㎜以上の上筋結束のみ対応でしたが、スラブ厚さ150㎜以上の上筋・下筋結束に対応可能となりました。また、これまで対応できなかった合成スラブのデッキ配筋でも対応が可能となり、これまで利用できなかった様々なスラブ結束に対応しています。
かぶり30㎜への対応は、鉄筋結束トモロボに取り付けが簡単なアタッチメントを装着するだけで対応かぶりを50㎜から30㎜に変更可能です。
※鉄筋のかぶりとは、コンクリート面から鉄筋までの距離です。かぶりを確保することで鉄筋の酸化を防ぐ効果があります。
全自動結束システム「DUO」及び鉄筋結束トモロボ「かぶり30㎜以上の対応」は、どちらも7月より提供開始予定になります。
建ロボテックは、職人の大量作業からの解放と建設現場の生産性向上を目指し、日々研究開発を行っております。今後も、鉄筋結束トモロボをより簡単に便利にどの現場でも利用できるようバージョンアップを進めてまいります。


 詳しい資料をダウンロード
詳しい資料をダウンロード
 お問い合わせ
お問い合わせ